
Los sistemas de adquisición, seguimiento y puntería (ATP) son muy utilizados en ámbitos militares y de seguridad, para neutralizar amenazas diversas y particularmente en la actualidad, en misiones específicas contra los Sistemas Autónomos Aéreos (C-UAS) que proliferan en los escenarios de guerra. El presente trabajo desarrolla una técnica de ejecución del seguimiento de objetivos de alta velocidad, mediante el uso de un control predictivo de avance de múltiples velocidades.
Abstract
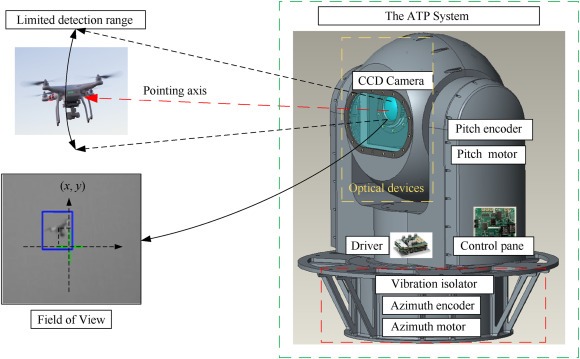
The acquisition, tracking, and pointing (ATP) system is widely used in target tracking, counter-UAV operations, and other related fields. As UAV technology develops, there is a growing demand to enhance the tracking capabilities of ATP systems. However, in practical applications, ATP systems face various design constraints and functional limitations, making it infeasible to indefinitely improve hardware performance to meet tracking requirements. As a result, tracking algorithms are required to execute increasingly complex tasks. This study introduces a multi-rate feedforward predictive controller to address issues such as low image feedback frequency and significant delays in ATP systems, which lead to tracking jitter, poor tracking performance, low precision, and target loss. At the same time, the proposed approach aims to improve the tracking capabilities of ATP systems for high-speed and highly maneuverable targets under conditions of low sampling feedback rates and high feedback delays. The method suggested is also characterized by its low order, fast response, and robustness to model parameter variations. In this study, an actual ATP system is built for target tracking test, and the proposed algorithm is fully validated in terms of simulation and actual system application verification. Results from both simulations and experiments demonstrate that the method effectively compensates for delays and low sampling rates. For targets with relative angular velocities ranging from 0 to 90°/s and angular accelerations between 0 and 470°/s2, the system improved tracking accuracy by 70.0% to 89.9% at a sampling frequency of 50 Hz and a delay of 30 ms. Moreover, the compensation algorithm demonstrated consistent performance across actuators with varying characteristics, further confirming its robustness to model insensitivity. In summary, the proposed algorithm considerably enhances the tracking accuracy and capability of ATP systems for high-speed and highly maneuverable targets, reducing the probability of target loss from high speed. This approach offers a practical solution for future multi-target tracking across diverse operational scenarios.
 Fuente: https://www.sciencedirect.com
Fuente: https://www.sciencedirect.com