
Con los avances en el desarrollo de tecnologías de navegación, guiado y control, los sistemas de armas de artillería para las guerras actuales y futuras, van migrando gradualmente de los fuegos masivos con proyectiles convencionales, hacia los proyectiles guiados de precisión. Ante esa tendencia de armas de mayor precisión, informatización y sistematización, incorporar sistemas de guiado a las municiones convencionales es un objetivo deseado. Pero ocurre que ese tipo de proyectiles dependen para su navegación de la información proporcionada por satélites, cuyas señales pueden interrumpirse o resultar defectuosas. Cómo asegurar la estabilidad y confiabilidad del sistema de navegación, es un problema que debe resolverse de manera urgente. En el presente trabajo, los investigadores proponen como solución posible, la incorporación de un algoritmo integrado de navegación basado en redes neuronales, para la asistencia balística en condiciones de GNSS denegado.
Abstract
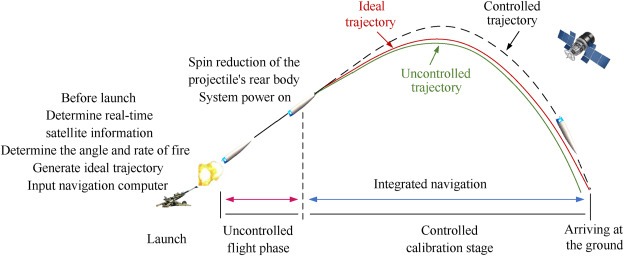
In complex environments such as high dynamics and weak signals, a satellite signal compensation method based on prefabricated trajectory assistance and an improved adaptive Kalman filter is proposed for a 155 mm differential rotating rear-body control-guided projectile to address the situation of satellite signal flickering and loss in projectile navigation systems due to environmental limitations. First, establish the system state and measurement equation when receiving satellite signals normally. Second, a seven-degree-of-freedom external ballistic model is constructed, and the ideal trajectory output from the ballistic model is used to provide the virtual motion state of the projectile, which is input into a filter as a substitute observation when satellite signals are lost. Finally, an adaptive Kalman filter (AKF) is designed, the proposed adaptive Kalman filter can accurately adjust the estimation error covariance matrix and Kalman gain in real-time based on information covariance mismatch. The simulation results show that compared to the classical Kalman filter, it can reduce the average positioning error by more than 38.21% in the case of shortterm and full-range loss of satellite signals, providing a new idea for the integrated navigation of projectiles with incomplete information under the condition of satellite signal loss.
 Fuente: https://www.sciencedirect.com
Fuente: https://www.sciencedirect.com