
Los proyectiles guiados del tipo Spinning Glide-Guided Projectile (SGGP), combinan las ventajas de la estabilidad dada por la rotación sobre su eje, con superficies de sustentación que le permiten un “planeo” que contribuye a incrementar su alcance. Sin embargo, estas ventajas generan también incertidumbres, debidas a las condiciones iniciales del disparo y a perturbaciones externas durante la trayectoria, que terminan afectando su precisión. El presente trabajo investiga el diseño de un autopiloto para un proyectil SGGP, capaz de accionar sobre la “actitud del vector” durante su trayectoria, contribuyendo así a mitigar las perturbaciones citadas.
Abstract
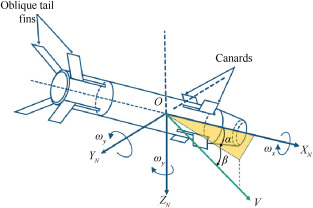
This paper investigates the design of an attitude autopilot for a dual-channel controlled spinning glide-guided projectile (SGGP), addressing model uncertainties and external disturbances. Based on fixed-time stable theory, a disturbance observer with integral sliding mode and adaptive techniques is proposed to mitigate total disturbance effects, irrespective of initial conditions. By introducing an error integral signal, the dynamics of the SGGP are transformed into two separate second-order fully actuated systems. Subsequently, employing the high-order fully actuated approach and a parametric approach, the nonlinear dynamics of the SGGP are recast into a constant linear closed-loop system, ensuring that the projectile’s attitude asymptotically tracks the given goal with the desired eigenstructure. Under the proposed composite control framework, the ultimately uniformly bounded stability of the closed-loop system is rigorously demonstrated via the Lyapunov method. Validation of the effectiveness of the proposed attitude autopilot design is provided through extensive numerical simulations.

Fuente: https://www.sciencedirect.com